-
1 общие реакции
-
2 время реакции
время реакции
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
3.1 время реакции (time of reaction): Промежуток времени между подведением пробного вещества к месту расположения течи и появлением выходного сигнала течеискателя.
Источник: ГОСТ Р 53177-2008: Вакуумная техника. Определение характеристик масс-спектрометрического метода контроля герметичности оригинал документа
3.34 время реакции (response time): Время, необходимое для достижения измерительным оборудованием 90 % результирующего значения после ступенчатого изменения входного сигнала.
Источник: ГОСТ Р МЭК 62209-1-2008: Воздействие на человека радиочастотных полей от ручных и располагаемых на теле беспроводных устройств связи. Модели человека, измерительные приборы и процедуры. Часть 1. Порядок определения коэффициента удельного поглощения энергии для ручных устройств, используемых в непосредственной близости к уху (полоса частот от 300 МГц до 3 ГГц) оригинал документа
3.17 время реакции (response time): Время, необходимое для достижения элементом определенного состояния на выходе после получения сигнала, обусловливающего переход к этому состоянию на выходе.
[Глоссарий безопасности МАГАТЭ, Версия 2.0,2006]
Источник: ГОСТ Р МЭК 62385-2012: Атомные станции. Контроль и управление, важные для безопасности. Методы оценки рабочих характеристик измерительных каналов систем безопасности оригинал документа
4.1 время реакции t0,5 (response time t0,5): Интервал времени между начальным моментом изменения расхода или температуры потока и моментом, когда изменение значения измеряемой величины достигает 50 %.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Русско-английский словарь нормативно-технической терминологии > время реакции
-
3 реакция
от лат. re… против + action действие- общие реакции - асимметричная реакция ценДействие, возникающее в ответ на ту или иную ситуацию или стимул. — A response to a situation or stimulus.
-
4 response time
- инерционность (прибора или устройства)
- время установления показаний
- время срабатывания
- время регулирования
- время реакции (в информационных технологиях)
- время реакции
- время реагирования
- время отклика системы
- время отклика
- время ответа
- время действия
- быстродействие (в пожарозащите)
быстродействие (в пожарозащите)
Применительно к быстродействующей системе пожарозащиты время между началом возгорания и подачей воды на объект
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
время действия
быстродействие
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
EN
время ответа
время реакции
время отклика
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
время отклика
Этот термин используется в управлении мощностями в качестве меры производительности ИТ-инфраструктуры.
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]EN
response time
[Словарь терминов ITIL версия 1.0, 29 июля 2011 г.]Тематики
EN
время реагирования
Временной промежуток между временем обнаружения разлива нефти и началом очистных работ.
[ ГОСТ Р 53389-2009]Тематики
Обобщающие термины
- восстановление
- терминология, относящаяся к рабочим характеристикам
EN
время реакции
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
время реакции (в информационных технологиях)
Мера времени, необходимого для выполнения операции. Используется в управлении мощностями для измерения производительности ИТ-инфраструктуры, а также в управление инцидентами — для измерения времени, необходимого для ответа по телефону или для начала диагностики.
[ http://www.dtln.ru/slovar-terminov]Тематики
EN
время регулирования
Характеристика управления, определяемая как интервал времени с момента подачи типового воздействия на вход объекта до момента вхождения значений выходной координаты в заданный диапазон ее значений в установившемся режиме функционирования объекта.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]
время регулирования
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]
Тематики
- автоматизация, основные понятия
EN
время срабатывания
Продолжительность времени или разность времени между любыми двумя электрическими или механическими функциями, выполняемыми управляющим устройством с отсчетом времени в течение автоматического действия.
[ГОСТ IЕС 60730-1-2011]
время срабатывания
Промежуток времени, в течение которого происходит срабатывание арматуры, т.е. перемещение запирающего элемента из одного крайнего положения в другое.
[ ГОСТ Р 52720-2007]
время срабатывания tr
Период времени между моментами начала работы устройства ограничения частоты вращения и срабатыванием двигателя внутреннего сгорания.
[ ГОСТ Р ИСО 8528-2-2007]
время срабатывания
tan
Время, необходимое для срабатывания устройства контроля изоляции при заданных условиях.
[ ГОСТ Р 61557-1-2006]Тематики
- арматура трубопроводная
- электроагрегаты генераторные
- электробезопасность
- электротехника, основные понятия
EN
инерционность (прибора или устройства)
время срабатывания
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
3.9 время срабатывания (response time): Интервал времени между отключением исполнительного устройства управления и окончанием выходного сигнала (см. также 9.8).
Источник: ГОСТ ИСО 13851-2006: Безопасность оборудования. Двуручные устройства управления. Функциональные аспекты и принципы конструирования оригинал документа
3.40 время установления показаний (response time): Временной интервал, измеряемый по окончании времени прогрева газоанализатора, от момента мгновенной замены чистого воздуха на поверочную газовую смесь на входе газоанализатора (или наоборот) до момента, когда выходной сигнал достигнет заданного уровня (х), в процентах от установившегося значения выходного сигнала при подаче поверочной газовой смеси.
Источник: ГОСТ Р 52350.29.2-2010: Взрывоопасные среды. Часть 29-2. Газоанализаторы. Требования к выбору, монтажу, применению и техническому обслуживанию газоанализаторов горючих газов и кислорода оригинал документа
3.3.1 время отклика (response time): Время, в течение которого прибор реагирует на внезапное изменение значения характеристики качества воздуха. Оно может быть разделено на две части (см. ИСО 6879).
Источник: ГОСТ Р ИСО 10155-2006: Выбросы стационарных источников. Автоматический мониторинг массовой концентрации твердых частиц. Характеристики измерительных систем, методы испытаний и технические требования оригинал документа
3.11. время реагирования (response time): Время между началом приложения силы к эффективной чувствительной области и реализацией разомкнутого состояния выходного переключателя по 4.3.
3.66 время отклика системы (response time): Временной период, необходимый для перехода водородного генератора из одного заданного режима в другой.
Источник: ГОСТ Р 54110-2010: Водородные генераторы на основе технологий переработки топлива. Часть 1. Безопасность оригинал документа
3.15 время отклика (response time): Интервал времени, в течение которого выходной сигнал достигает 90 % установившегося показания прибора.
Примечание - Время отклика включает время запаздывания и время нарастания/спада.
Источник: ГОСТ Р ИСО 12039-2011: Выбросы стационарных источников. Определение содержания монооксида углерода, диоксида углерода и кислорода. Характеристики и калибровка автоматических измерительных систем в условиях применения оригинал документа
3.34 время реакции (response time): Время, необходимое для достижения измерительным оборудованием 90 % результирующего значения после ступенчатого изменения входного сигнала.
Источник: ГОСТ Р МЭК 62209-1-2008: Воздействие на человека радиочастотных полей от ручных и располагаемых на теле беспроводных устройств связи. Модели человека, измерительные приборы и процедуры. Часть 1. Порядок определения коэффициента удельного поглощения энергии для ручных устройств, используемых в непосредственной близости к уху (полоса частот от 300 МГц до 3 ГГц) оригинал документа
3.17 время реакции (response time): Время, необходимое для достижения элементом определенного состояния на выходе после получения сигнала, обусловливающего переход к этому состоянию на выходе.
[Глоссарий безопасности МАГАТЭ, Версия 2.0,2006]
Источник: ГОСТ Р МЭК 62385-2012: Атомные станции. Контроль и управление, важные для безопасности. Методы оценки рабочих характеристик измерительных каналов систем безопасности оригинал документа
3.8.8. время срабатывания (response time) tan: Время, необходимое для срабатывания устройства контроля изоляции при заданных условиях.
Источник: ГОСТ Р МЭК 61557-1-2005: Сети электрические распределительные низковольтные напряжением до 1000 В переменного тока и 1500 В постоянного тока. Электробезопасность. Аппаратура для испытания, измерения или контроля средств защиты. Часть 1. Общие требования оригинал документа
5.2.18 время отклика (response time): Время, в течение которого прибор реагирует на внезапное изменение значения характеристики качества воздуха и которое включает в себя время запаздывания и время нарастания (режим нарастания) или время запаздывания и время спада (режим спада).
Источник: ГОСТ Р ИСО 6879-2005: Качество воздуха. Характеристики и соответствующие им понятия, относящиеся к методам измерений качества воздуха оригинал документа
Англо-русский словарь нормативно-технической терминологии > response time
-
5 antigen
антигенA antigen — А-антиген, В-изогемагглютинин ( один из двух антигенов группы крови AB0)
AB0 antigens — AB0-антигены, антигены группы крови AB0
acquired B antigen — трансформантный [ложноположительный] В-антиген (антиген, образующийся при спонтанной модификации A-антигена на эритроцитах под действием эндогенной деацилазы в ходе АВ0-типирования)
activated lymphocyte antigen 1 — Ala-1-антиген (аллоантиген активированных лимфоцитов, являющийся дифференцировочным антигеном Т- и В-эффекторных клеток)
activation antigen — активационный антиген (индуцибельный антиген, появляющийся в клетке после стимуляции митогеном или индуктором)
allo-cell antigen — аллоклеточный антиген, антиген аллогенной клетки
allostimulating antigen — стимулирующий аллоантиген; сенсибилизирующий аллоантиген
allotypic antigen — аллоантиген, аллотипический антиген
Am antigen — Am-антигеи, Am-маркёр, alpha-маркёр, Am-аллотип
antibody-complexed antigen — комплекс антиген-антитело, иммунный комплекс
antibody-defined antigen — серологически типируемый [серотипируемый] антиген
Anton antigen — антиген (группы крови) Антон ( эритроцитарный рецептор для клеток Haemophilus influenzae)
artificial antigen — синтетический [искусственный] антиген
asymmetric bifunctional antigen — гетеродетерминантный антиген (бидетерминантный антиген с одним собственным и вторым гаптеновым эпитопами)
Australia antigen — гепатитассоциированный [австралийский] антиген
autosperm antigen — антиген аутологичной спермы, спермальный аутоантиген
B antigen — B-антиген, A-изогемагглютинин ( один из двух антигенов группы крови AB0)
blank antigens — «потенциальные антигены», «бланк»-антигены (не идентифицированные до настоящего времени антигены некоторых локусов HLA-системы)
B lineage-associated antigen — антиген B-клеточной линии дифференцировки, B-клеточный дифференцировочный антиген
blockading antigen — блокирующий [экранирующий] антиген (антиген, препятствующий связыванию лиганда с рецептором)
blood-stage antigen — гематостадийный антиген ( антиген малярийного плазмодия на стадии размножения в крови)
bridged antigen — мостикообразующий антиген (напр. молекула антигена, связывающая Т- и В-клетки)
buried antigen — замаскированный антиген (напр. минорный антиген в составе обширного пула клеточных мембранных белков)
capsular antigen — капсульный антиген, антиген капсулы ( бактерий)
carcinofetal antigen — карциноэмбриональный [онкоэмбриональный] антиген
certified antigen — стандартизованный [эталонный] антиген, референс-антиген
chromosomal antigen — антиген, кодируемый хромосомой
class I antigens — антигены первого класса (антигены гистосовместимости, кодируемые у человека локусами А, В и C, а у мыши – локусами D u K)
class II antigens — антигены второго класса (антигены гистосовместимости, кодируемые у человека локусами DR, MB, MT и Te)
class Ш antigens — антигены третьего класса (B-фактор и C4-компонент системы комплемента, кодируемые генами главного комплекса гистосовместимости)
closely related antigens — близкородственные [перекрёстнореагирующие] антигены
colonization antigens — антигены колонизации (антигены вирулентных бактериальных штаммов, экспрессируемые в процессе заражения органов и тканей организма)
common acute lymphoblastic leukemia antigen — калла-ангиген, антигенный маркёр острого лимфобластного лейкоза
competing antigens — конкурирующие антигены (близкородственные или идентичные антигены, участвующие в реакции связывания антител)
complex antigen — сложный антиген (напр. комплекс белка с липополисахаридом)
core antigen — ядерный [коровый] антиген
cortical-specific antigen — кортикальный антиген (антиген, специфичный для кортикальной области вилочковой железы)
cross-reacting antigens — близкородственные [перекрёстнореагирующие] антигены
cryptic antigen — криптантиген (напр. гликозилированный антиген)
cutaneous antigen — антиген кожи, дермальный антиген, дермаген
D antigen — D-антиген, D-фактор ( антигенная детерминанта в составе резус-антигенов группы крови CDE)
dander antigen — антиген [аллерген] перхоти
diagnostic antigen — диагностический антиген; антигенный диагностикум
Diego antigen — Диего-антиген (антиген группы крови Duffy, встречающийся наиболее часто у негритянского населения)
differentiation antigen — дифференцировочный антиген (антиген, специфичный для определённой стадии клеточной дифференцировки)
distantly related antigens — (эволюционно) далёкие антигены, антигены с низкой степенью родства
drug-mediated tumor antigen — антигенная детерминанта, модифицированная химиопрепаратами (опухолевая неоантигенная детерминанта, сформировавшаяся в результате модификации исходного эпитопа химиопрепаратом)
early activation antigen — ранний активационный антиген (клеточный антиген, специфичный для ранних стадий иммунного ответа)
entrapped antigen — инкапсулированный ( заключённый в иммунолипосому) антиген; «арестованный» [интегральный] антиген
environmental antigen — антиген окружающей среды, природный антиген; аллерг. экзогенный антиген
epidemic hepatitis-associated antigen — миланский антиген, антиген эпидемического гепатита (антиген, ассоциированный с эпидемическим гепатитом)
fed antigen — абсорбированный ( макрофагом) антиген
fetal-leukemic antigen — лейкофетальный антиген, антигенный маркёр лейкоза
fetal sulfoglycoprotein antigen — эмбриональный сульфогликопротеиновый антиген, антиген Хеккинена
fiber antigen — волокнистый [фиброзный, фибриллярный] антиген
filarial antigen — филярийный антиген, антиген пилий
flagellar antigen — жгутиковый [флагеллярный] антиген
fragmented antigen — 1) фрагментированный ( подвергнутый ограниченному протеолиэу или химической деградации) антиген 2) процессированный антиген
function-associated antigen — функционально-связанный антиген (антиген, имеющий отношение к выполнению специализированной клеточной функции, напр. антиген, специфичный для активированных клеток-киллеров)
fungal antigen — грибковый [фунгоидный] антиген
gametic antigen — антиген половой [зародышевой] клетки, гаметический антиген
Gm antigens — Gm-антигены, Gm-маркёры, gamma-маркёры, Gm-аллотипы
Goodpasture antigen — антиген гломерулярной базальной мембраны, антиген Гудпасчура
grafted antigen — 1) трансплантированный ( в составе трансплантата) антиген 2) антиген, преодолевший трансплацентарный барьер
group-specific antigens — группоспецифические (напр. вирусные) антигены
gs antigens — группоспецифические (напр. вирусные) антигены
harmless antigen — безопасный антиген (антиген, не имеющий токсических или инфекционных свойств)
helminth antigen — антиген гельминтов, глистный антиген
hetero-cell antigen — гетероклеточный антиген, гетероантиген ( антиген с широкой клеточной специфичностью)
heterogeneous cryptic antigens — гетерогенетические криптантигены, антигены Фриденрайха
heterogenetic antigens — гетерогенетические [гетерофильные] антигены
heterophil antigens — гетерофильные [гетерогенетические] антигены
Heymann antigen — антиген Хеймана (антигенный белок клубочковой мембраны, участвующий в развитии аутоиммунного нефрита Хеймана у крыс)
H2-linked differentiation antigen — дифференцировочный антиген, сцепленный с H2-локусом ( главного комплекса гистосовместимости мыши)
human leukocyte antigens — главный комплекс гистосовместимости у человека, HLA-комплекс, HLA-система
immunodominant antigen — 1) высокоиммуногенный антиген 2) иммунодоминантный [ключевой] антиген ( в сложной смеси антигенов)
inaccessible antigen — «забарьерный» [секвестрированный] антиген (аутоантиген, недоступный для системы иммунологического распознавания)
inhaled antigen — вдыхаемый [ингаляционный] антиген, аэроантиген
innate antigen — генетически детерминированный антиген, естественный антиген организма
interfering antigens — близкородственные [перекрёстнореагирующие] антигены
internal image antigen — «внутренний образ» антигена ( переносимый антиидиотипическим антителом)
jumping antigens — «прыгающие» [«мигрирующие»] антигены (антигены, встречающиеся на клетках различных линий дифференцировки)
K antigens — капсульные ( бактериальные) антигены, K-антигены
Km antigens — Km-антигены, Km-маркёры, kappa-маркёры, Km-аллотипы
Kunin antigen — видоспецифический энтеробактериальный антиген, уст. антиген Кунина
Kveim's antigen — антиген Квайма (субстанция, экстрагируемая из селезёнки и лимфатических узлов больных саркоидозом)
late differentiation antigens — поздние дифференцировочные антигены ( антигены поздних стадий клеточной дифференцировки)
LD antigens — LD-антигены, LD-детерминанты (антигены гистосовместимости, выявляемые с помощью метода типирования лимфоцитами)
lens antigen — хрусталиковый антиген; кристаллин
linked-genes associated antigen — эписемантидный антиген ( синтез которого зависит от группы сцепленных генов)
Ly antigens — Ly-(алло)антигены (дифференцировочные антигены, локализованные на мембране лимфоцитов мышей)
lymphoblast-specific antigen — антигенный маркёр лимфобластов, лимфобластный антиген
lymphocyte-function-associated antigen — функционально-связанный антиген лимфоцитов, функциональный антигенный маркёр лимфоцитов
Lyt antigens — Lyt-антигены (Ly-антигены, обнаруживаемые только на T-лимфоцитах)
male-specific antigen — антиген, специфичный для особи мужского пола
Medawar's antigens — антигены гистосовместимости, уст. антигены Медавара
membrane antigen — 1) мембранный антиген, противозонное антитело ( антиген наружной клеточной мембраны) 2) лаб. антиген, иммобилизованный на ( синтетической) мембране
MLC antigens — LD-антигены, LD-детерминанты, уст. MLC-антигены
modified antigen — модифицированный ( химически изменённый) антиген
modified-self antigen — модифицированный ( химически изменённый) аутоантиген
monodeterminant antigen — монодетерминантный [моновалентный] антиген
monofunctional antigen — 1) монодетерминантный [моновалентный] антиген 2) (поливалентный) антиген с одной функционально активной ( иммунореактивной) детерминантой
monovalent antigen — монодетерминантный [моновалентный] антиген
mutant antigen — антиген, кодируемый мутантным аллелем
myeloid-lineage antigen — миелоидный антиген, антиген миелоидной линии ( дифференцировки)
natural antigen — антиген окружающей среды, природный антиген; аллерг. экзоантиген
neo-self antigen — неоаутоантиген (общераспространённый антиген, ставший аутоантигеном после, напр. трансгенного переноса соответствующего аллеля в клетки другого вида)
neuroendocrine antigen — антиген нейроэндокринной ткани (напр. гипоталамо-гипофизарной области)
nominal antigen — псевдоантиген (антиген, кодируемый молчащей областью генома)
nondialyzable protein antigen — недиализуемый белковый антиген ( крупномолекулярный антигенный комплекс)
nonshared antigens — чужеродные [неродственные] антигены (антигены, не имеющие общих детерминант)
Old World Monkey antigen — антиген старосветской мартышки, OWM-антиген ( пентапептид тяжёлой цепи обезьяньего иммуноглобулина)
oncofetal antigen — карциноэмбриональный [онкоэмбриональный] антиген
outer membrane antigen — антиген наружной мембраны, антиген плазмалеммы
OWM antigen — антиген старосветской мартышки, OWM-антиген ( пентапептид тяжёлой цепи обезьяньего иммуноглобулина)
partial antigen — компонент сложного антигена, парциальный антиген
particle antigen — корпускулярный [крупнодисперсный] антиген; нерастворимый антиген
particulate antigen — крупнодисперсный [корпускулярный] антиген; нерастворимый антиген
paternal-genome-derived antigen — отцовский антиген (антиген ребёнка, обладающий значимостью при установлении отцовства)
peplomer antigen — пепломерный антиген (иммунодоминантный гликопротеин в составе выростов или шпилей вирионной оболочки)
pregnancy-associated antigen — антиген зоны беременности, гравидальный антиген
pregnancy zone antigen — антиген зоны беременности, гравидальный антиген
private antigen — антиген, определяющий индивидуальную специфичность; мн. «частные» [уникальные, субтипируемые] антигены ( системы HLA)
public antigens — «общие» [убиквиторные, супертипируемые] антигены ( системы HLA)
quasi-endodermal antigens — «ложноэндодермальные» антигены, антигены Артца (антигены, распространённые наряду с эндодермой в других зародышевых листках)
radioactive antigen — меченный изотопом антиген, радиоактивный антиген
recalcitrant antigen — эволюционно стабильный [консервативный] антиген
recall antigen — «воскресший» антиген (антиген ткани донора, способный вызвать иммунную реакцию со стороны реципиента)
reference antigen — стандартизованный [эталонный] антиген, референс-антиген
restricted antigen — эволюционно стабильный [консервативный] антиген
Rh antigen — резус-антиген, Rh-антиген, резус-агглютинин
Rh0 antigen — (гипотетический) антиген эритроцитов с Rh0-фенотипом, Rh0-антиген
ring-infected erythrocyte surface antigen — поверхностный антиген эритроцитов, инфицированных кольцевидным трофозоитом
SB antigen — вторичный B-клеточный антиген ( определяемый в тесте пролиферации лимфоцитов при вторичном ответе)
SD antigens — SD-антигены, SD-детерминанты (серологически определяемые антигены гистосовместимости, кодируемые у человека локусами A, B и C HLA-области)
secondary B-cell antigen — вторичный B-клеточный антиген ( определяемый в тесте пролиферации лимфоцитов при вторичном ответе)
self-tissue antigen — тканевый аутоантиген, антиген аутологичной ткани
sequestered antigen — секвестрированный [«забарьерный»] антиген (аутоантиген, недоступный для системы иммунологического распознавания)
serogroup-specific antigens — антигены серологических групп, сероварные антигены
sex-associated antigen — половой антиген, сцепленный с полом антиген
sex-limited antigen — половой антиген, сцепленный с полом антиген
sexual stage-specific antigen — антиген спорогоний ( антиген половой стадии развития малярийного плазмодия)
shared antigens — близкородственные [перекрёстнореагирующие] антигены
shed antigen — «слущивающийся» ( с клетки) антиген
skin antigen — антиген кожи, дермальный антиген, дермаген
skin-test antigen — кожный [кожно-аппликационный] тест-антиген
speckled antigen — антиген клеточного ядра, лишённый нуклеиновых компонентов
split antigens — «общие» [убиквиторные, супертипируемые] антигены ( системы HLA)
stage-specific antigen — транзиторный [стадиеспецифический] антиген
subcapsular antigens — внутрикапсульные [субкапсульные] антигены ( бактериальных клеток)
subtypic antigen — антиген, определяющий индивидуальную специфичность, мн. «частные» [уникальные, субтипируемые] антигены ( системы HLA)
supertypic antigens — «общие» [убиквиторные, супертипируемые] антигены ( системы HLA)
surface antigen ody — поверхностный [мембранный] антиген
surrogate antigen — антиген-имитатор (напр. антиидиотипическое антитело)
symmetrical bifunctional antigen — гомодетерминантный ( природный) антиген ( бидетерминантный антиген с двумя собственными эпитопами)
synthetic antigen — синтетический [искусственный] антиген
T antigen — 1) T-клеточный антиген ( антиген T-клеточной линии дифференцировки) 2) супер-T-антиген ( антигенный надмолекулярный комплекс вируса SV40) 3) T-антиген ( сперматозоидов)
target antigen body — антиген-мишень; антиген (клетки-)мишени
test antigen — тест-антиген; контрольный антиген
therapeutic antigen — терапевтический [лечебный] антиген
tissue-specific antigen — тканеспецифический [тканевый] антиген
tolerance-conferring antigen — толерогенный антиген, толероген
transgene-encoded antigen — трансгенизированный [трансгенный] антиген
transgenic antigen — трансгенный [трансгенизированный] антиген
transitory antigen — транзиторный [стадиеспецифический] антиген
treponemal antigen — трепонемальный [спирохетозный] антиген, паллида-антиген
tumor rejection antigen — антиген отторжения опухоли (опухолеспецифический антиген, участвующий в реакции отторжения опухоли)
unlike antigens — чужеродные [неродственные] антигены (антигены, не имеющие общих детерминант)
vaccine antigen — антиген, используемый для приготовления вакцины
viral antigen — вирусный [вирус-специфический] антиген
virulence antigens — антигены вирулентности (антигены, определяющие вирулентные свойства микроба)
weak antigen — «слабый» [низкоиммуногенный] антиген
-
6 Objective, Burma!
Цель – Бирма!1945 – США (142 мин)Произв. Warner (Джерри Уолд)Реж. РАУЛЬ УОЛШСцен. Рэналд Макдугалл, Лестер Коул по сюжету Алвы БессиОпер. Джеймс Вонг ХауМуз. Франц УэксменВ ролях Эррол Флинн (капитан Чарлз Р. Нелсон), Уильям Принс (лейтенант Сидни Джейкобз), Джеймс Браун (сержант Джон Триси), Джордж Тобайас (капрал Гэбби Гордон), Генри Халл (Марк Уильямз), Уорнер Эндерсон (полковник Дж. Картер), Джон Элвин (Чарлз Хоган).Прошло два года после того, как японцы вытеснили генерала Стилуэлла из Бирмы, перекрыв американцам дорогу в Китай. Все это время армия активно готовила повторное вторжение в Бирму. Вместо прелюдии к наступлению группа солдат под командованием капитана Нелсона высаживается на парашютах в джунгли. Их задание – уничтожить радар, который не удается поразить с воздуха. В отряд входит журналист Марк Уильямз. Он намного старше остальных и прыгает с парашютом впервые в жизни. Группа атакует станцию неожиданно, уничтожает японских солдат, застигнутых за обедом, и взрывает динамитом все постройки. Первая часть задания выполнена успешно: она оказалась почти до смешного простой. Но теперь, когда осталось лишь вернуться домой, начинаются сложности.Самолет, который должен был забрать солдат на базу, вынужден развернуться: на месте встречи собралось около сотни японских солдат, и Нелсон просит по рации отменить посадку. 2 дня спустя, после медленного и изнурительного 45-км марш-броска через джунгли, десантникам скидывают на парашютах 1-ю партию провианта. Перед этим бойцы разделились на 2 группы. Нелсон узнает, что его людей не смогут вывезти на самолете, поскольку поблизости нет пригодной посадочной полосы. Солдатам будут скидывать припасы раз в 4 дня. Группа Нелсона находит 2 человек из другой группы: остальные погибли в жестокой резне. Они выходят к бирманской деревне, утром оставленной японцами. Там солдаты убивают задержавшихся японских часовых и находят страшно изувеченные тела своих товарищей. Один умоляет Нелсона пристрелить его и умирает у него на глазах. Японцы возвращаются в деревню. После перестрелки американцы вынуждены отступить, бросив тела убитых.При 2-м забросе провианта Нелсон получает новый приказ: о возвращении на базу придется забыть, вместо этого отряд должен направиться на север. Солдаты не успевают унести ящики с припасами, попадают в засаду японцев и уходят из-под обстрела. Они с огромным трудом продираются сквозь джунгли и переправляются через реку; им не удается подать сигнал самолету, прилетевшему на помощь. Старый журналист от усталости начинает сходить с ума. Солдаты забираются на холм: там назначена встреча, на которой они должны получить дальнейшие инструкции. Поблизости нет никого, и они впадают в отчаяние. Журналиста находят мертвым. Нелсон карманным зеркальцем дает сигнал самолету, который сбрасывает партию провианта. Но японцы засекли отряд и под покровом ночи атакуют холм. Один японец, говоря по-английски, заманивает в ловушку десантника и убивает его. Но другой десантник не попадает в западню и подрывает японца гранатой. В свете пламени мелькают японцы, собравшиеся у подножия холма. Они несут тяжелые потери и сдают позиции. На следующий день солдаты видят в бирманском небе самолеты. «Парашютный дождь!» – кричит солдат. Нелсон находит своего командира и передает ему пригоршню жетонов, снятых с солдат, заплативших жизнью за ликвидацию радара. Вместе с теми, кто уцелел, он садится в самолет и возвращается на базу.► Один из лучших фильмов Уолша и шедевр американского военного фильма (наряду с Нагими и мертвыми, The Naked and the Dead того же Уолша и Мародерами Меррилла, Merrill's Marauders Фуллера). В 2 предыдущих фильмах с Эрролом Флинном Уолш показывал войну как игру (Отчаянный рейд, Desperate Journey), как необычную и неожиданную возможность для спасения души ( Сомнительная слава, Uncertain Glory). В Цель ― Бирма! он показывает войну как опасное коллективное приключение, требующее мобилизации всех усилий. Игра Флинна, лишенная прикрас и иронии, соответствует режиссерским намерениям. Этот фильм – абсолютное торжество классического искусства, идеально сочетающего в себе конкретику и абстракцию, аналитическое и синтетическое описание реальности, планы крупные и общие, короткие и длинные, сдержанность и зрелищность: все это вместе рождает картину, которая, хоть и снята но горячим следам, в определенном контексте и с определенными целями, тем не менее сразу же попадает в категорию вечного. Через 50 лет этот фильм будут смотреть с тем же восхищением, какое он внушает сегодня. Больше всего в фильме изумляет гениальность, с которой Уолш постоянно разбирает на фазы каждое действие, реакции тех, кто его совершает, а затем тут же собирает их вместе, создавая общий взгляд на это действие или на физическое и психическое поведение бойцов. Будь это бурная деятельность в лагере, прерванная сообщением о летучке через час; спокойствие, нервозность или тревога парашютистов перед прыжком; сам прыжок; разные реакции солдат на усталость, опасность, упадок духа или появление новой надежды и новых сил, – Уолш создает синтетическую картину реальности, охватывающую все аспекты, причем ни один не выпячивается. Конечно, Уолш не скрывает, что описывает еще не вполне одержанную победу С удивительной сдержанностью (которая идет вразрез с напыщенной интонацией большинства военных фильмов тех лет) режиссер показывает эту победу в зародыше, в тесной и ощутимой сплоченности членов группы и их руководителя. Каждый герой по собственной воле и из инстинктивного желания выжить при выполнении задания растворяется в группе.Наделяя каждого героя характерными чертами, Уолш сторонится красочности Форда, а также невротичных нотаций, которые захлестнут голливудские фильмы о войне в 50-е гг. В разгар сражений, которые ведет его страна, он говорит, что необходимость, опасность, борьба за жизнь, смелость рождают в здоровом коллективе защитные реакции от внутреннего разрушения и агрессивные реакции против внешнего врага. Он хочет также показать, что в обоих случаях эти реакции сильны до такой степени, что позволяют добиться победы. Таким образом, доля надежды и доля реализма (а кроме того – доля космической сверхъестественности в манере съемок и постижения реальности) оживляют эту картину. Уолш, талантливый хроникер, художник и эпический поэт, сумел здесь крайне удачно поймать мгновение и придать актуальному историческому моменту черты вечности.N.B. В повторный прокат фильм часто выходил в сокращенном виде. На кассете, выпущенной компанией «Warner Home Video», он присутствует в полной версии с субтитрами. Операторская работа Джеймса Вонга Хау восстановлена довольно неплохо.Авторская энциклопедия фильмов Жака Лурселля > Objective, Burma!
-
7 основание
3.2.2 основание (base): вещество, которое при химической реакции образует новое соединение, выступая донором электронных пар.
Источник: ГОСТ Р ИСО 14644-8-2008: Чистые помещения и связанные с ними контролируемые среды. Часть 8. Классификация молекулярных загрязнений в воздухе оригинал документа
2.22 основание (base): Вещество, которое при химической реакции образует новое соединение, выступая донором электронных пар.
[ИСО 14644-8:2006, статья 3.2.2]
Источник: ГОСТ Р ИСО 14644-6-2010: Чистые помещения и связанные с ними контролируемые среды. Часть 6. Термины оригинал документа
3.21 основание (foundation soil): Донные грунты в естественном состоянии или насыпные материалы, воспринимающие нагрузку от установленных морских стационарных платформ.
Источник: ГОСТ Р 54483-2011: Нефтяная и газовая промышленность. Платформы морские для нефтегазодобычи. Общие требования оригинал документа
Русско-английский словарь нормативно-технической терминологии > основание
-
8 base
- цоколь лампы
- уровень отсчета
- сеть с непосредственной (немодулированной) передачей
- провешенная линия на местности
- основной электрод
- основной (в криптографии)
- основная доска (прибора)
- основание розетки
- основание пьезоэлектрического резонатора
- основание авиационного средства пакетирования
- основание (измерительного прибора)
- основание (выключателя)
- основание
- основа (носителя записи)
- нижняя панель
- изолирующее основание
- базовый компонент топлива
- база (параметр подкрановых путей)
база
B
Расстояние между осями опор крана, измеренное по его продольной оси.
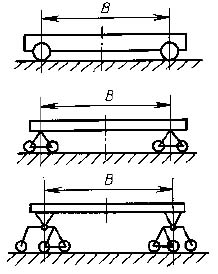
[ ГОСТ 27555-87 ИСО 4306/1-85]Тематики
Обобщающие термины
- параметры, связанные с подкрановыми путями
EN
FR
базовый компонент топлива
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
изолирующее основание
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
основа (носителя записи)
Ндп. подложка
Слой носителя записи, предназначенный для придания ему механической прочности и формы.
[ ГОСТ 13699-91]Недопустимые, нерекомендуемые
Тематики
EN
DE
основание (выключателя)
Часть выключателя, на которую крепятся токоведущие части и механизм выключателя.
[ ГОСТ Р 51324. 1-2005 ( МЭК 60669-1: 2000)]Тематики
EN
основание (измерительного прибора)
-EN
base
back of the meter by which it is generally fixed and to which are attached the measuring element, the terminals or the terminal block, and the cover.
For a flush-mounted meter, the meter base may include the sides of the case
[IEC 62052-11, ed. 1.0 (2003-02)]FR
socle
partie arrière du boîtier servant généralement à sa fixation et sur laquelle sont montés l'élément de mesure, les bornes ou la plaque à bornes et le couvercle.
Pour un compteur à montage encastré, le socle peut comprendre également les flancs du boîtier.
[IEC 62052-11, ed. 1.0 (2003-02)]Тематики
- аппарат, изделие, устройство...
EN
FR
основание авиационного средства пакетирования
Нижний конструктивный узел авиационного средства пакетирования, воспринимающий нагрузку, приложенную к полу, и от продольного изгиба авиационного контейнера.
[ ГОСТ Р 53428-2009]Тематики
EN
основание пьезоэлектрического резонатора
основание
Часть держателя пьезоэлектрического резонатора, служащая для крепления каркаса держателя и выводов пьезоэлектрического резонатора.
[ ГОСТ 18669-73]Тематики
Синонимы
EN
DE
FR
основная доска (прибора)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
основной электрод
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
провешенная линия на местности
Линия, по которой производится ориентирование бурового станка при наклонном бурении
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
сеть с непосредственной (немодулированной) передачей
Используется в обозначении группы стандартов IEEE 802.3, разработанных комитетом 802.3:XBASEY, где Х - скорость передачи в Мбит/с, BASE – тип сети, Y – длина сегмента в сотнях метров или тип среды передачи.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
цоколь лампы
Деталь электрической лампы, служащая для ее крепления в патроне и обеспечивающая присоединение к питающей сети.
[ ГОСТ 15049-81]Типы цоколей ламп и их обозначение
Первая буква указывает на тип цоколя:
E – резьбовой цоколь( Эдисона)
G – штырьковый цоколь
R – цоколь с утопленным контактом
B – штифтовой цоколь (Байонет)
F – цоколь с одним штырьком
a – цилиндрический штырёк
b – рифленый штырёк
c – штырёк специальной формы
S – софитный цоколь
K – цоколь с кабельными соединениями
H – цоколь для ксеноновых ламп
P – фокусирующий цоколь
T – телефонный цоколь
W – основание, в котором электрический контакт с патроном осуществляется непосредственно через токовые вводы, расположенные на стеклянном основании лампы.
Последующее число указывает диаметр соединительной части цоколя или расстояние между контактами.
Если далее идут буквы, то они указывают на количество контактных пластин, штырьков или гибких соединений:
s - один контакт
d - два контакта
t - три контакта
q - четыре контакта
p - пять контактов
Иногда к первой букве добавляется еще одна буква, уточняющая (для некоторых типов):
U – энергосберегающая лампочка;
V – цоколь с коническим концом;
A – автомобильная лампа.
Пример расшифровки цоколя лампы: E14U – лампа энергосберегающая с резьбовым цоколем, диаметром 14 мм.
Если разделять цоколи ламп глобально, то существуют резьбовые цоколи и цоколи с поверхностными контактами (штыковые, с утопленным контактом и т.д.) Далее и поговорим более конкретно, о каждом из типов цоколей.
В зависимости от популярности мы будем приводить соответственное количество изображений и информаций о описываемых цоколях ламп. Также до того как мы начали рассказывать конкретно о каждом из них, предлагаем вам ознакомиться с возможными видами цоколей ламп.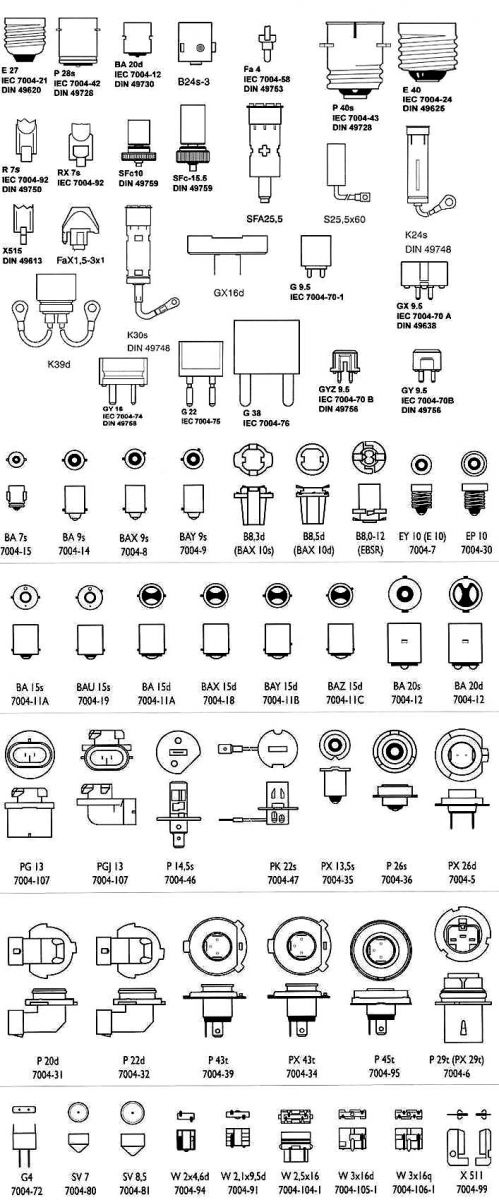
[ Источник]
Тематики
- лампы, светильники, приборы и комплексы световые
EN
3.30 основание розетки (base): Часть розетки, служащая для крепления гнездовых контактов и снабженная деталями для крепления розетки и присоединения ее к электрической сети.
Источник: ГОСТ Р 51322.1-2011: Соединители электрические штепсельные бытового и аналогичного назначения. Часть 1. Общие требования и методы испытаний оригинал документа
3.2.2 основание (base): вещество, которое при химической реакции образует новое соединение, выступая донором электронных пар.
Источник: ГОСТ Р ИСО 14644-8-2008: Чистые помещения и связанные с ними контролируемые среды. Часть 8. Классификация молекулярных загрязнений в воздухе оригинал документа
2.22 основание (base): Вещество, которое при химической реакции образует новое соединение, выступая донором электронных пар.
[ИСО 14644-8:2006, статья 3.2.2]
Источник: ГОСТ Р ИСО 14644-6-2010: Чистые помещения и связанные с ними контролируемые среды. Часть 6. Термины оригинал документа
Англо-русский словарь нормативно-технической терминологии > base
-
9 сходимость
3.6 сходимость (repeatability): Близость результатов двух испытаний, полученных одним методом, в идентичных условиях, водной лаборатории.
Источник: ГОСТ Р ИСО 8586-2-2008: Органолептический анализ. Общее руководство по отбору, обучению испытателей и контролю за их деятельностью. Часть 2. Эксперты по сенсорной оценке оригинал документа
3.12 сходимость (repeatability): Значение, ниже которого, как можно ожидать, с заданной доверительной вероятностью находится абсолютная разность между результатами двух одиночных измерений, полученных с помощью одного и того же метода на идентичном измеряемом материале, одним и тем же оператором, использующим одну и ту же аппаратуру, в одной и той же лаборатории, за короткий промежуток времени (условия сходимости); при отсутствии других указаний доверительная вероятность составляет 95 %.
Источник: ГОСТ 31371.1-2008: Газ природный. Определение состава методом газовой хроматографии с оценкой неопределенности. Часть 1. Руководство по проведению анализа оригинал документа
3.21 сходимость (convergence): Точное пересечение электронных пучков цветной электронно-лучевой трубки (ЭЛТ) в определенной точке на плоскости ее люминофорного экрана (см. рисунок 3).
Нарушение сходимости - отклонение от сходимости (см. рисунок 4).
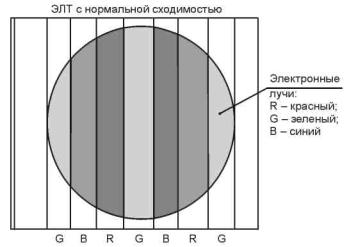
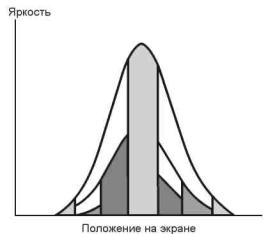
Рисунок 3 - ЭЛТ с нормальной сходимостью R, G, В электронных лучей
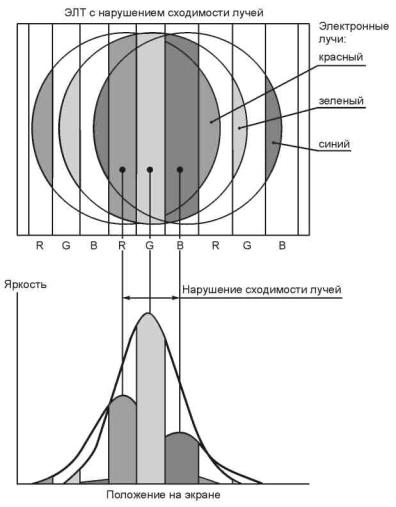
Рисунок 4 - ЭЛТ с нарушением сходимости R, G, В электронных лучей
Источник: ГОСТ Р ИСО 9241-8-2007: Эргономические требования при выполнении офисных работ с использованием видеодисплейных терминалов (ВДТ). Часть 8. Требования к отображаемым цветам оригинал документа
сходимость (repeatability): Способность весоизмерительного датчика выдавать последовательные согласованные результаты при одной и той же нагрузке, приложенной к весоизмерительному датчику несколько раз одним и тем же способом при постоянных условиях испытания.
[Международный словарь [1]]
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.30 сходимость (repeatability): Расхождение результатов измерений, полученных последовательно через короткие интервалы времени на образцах идентичного материала, одним и тем же методом, одними и теми же средствами, тем же самым наблюдателем, в той же самой лаборатории, в неизменных условиях окружающей среды.
Примечания
1. Временной интервал, равный приблизительно 10-кратному 90 %-ному времени реакции газоанализатора, допускается считать коротким интервалом.
2. Практически подход к измеряемому значению должен быть со стороны как меньших, так и больших значений измеряемой величины.
Источник: ГОСТ Р МЭК 61207-1-2009: Газоанализаторы. Выражение эксплуатационных характеристик. Часть 1. Общие положения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сходимость
-
10 repeatability
- сходимость
- повторяемость
- однотипность
- воспроизводимость (результатов)
- воспроизводимость (к условиям проведения анализа одним оператором в одной и той же лаборатории)
воспроизводимость (к условиям проведения анализа одним оператором в одной и той же лаборатории)
Относится к условиям проведения анализа одним оператором в одной и той же лаборатории и с использованием одного и того же оборудования
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
воспроизводимость (результатов)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
повторяемость
Прецизионность в условиях повторяемости (ИСО 3534-1 [1]).
Примечание.В отечественных нормативных документах наряду с термином «повторяемость» используют термин «сходимость», содержащийся также в 8.4 РМГ 29 и 3.6 VIM [4]. Далее в стандарте употребляют термин «повторяемость (сходимость)» (ГОСТ Р 51672).
[ ГОСТ Р ИСО 5725-1-2002]Тематики
- метрология, основные понятия
EN
3.6 сходимость (repeatability): Близость результатов двух испытаний, полученных одним методом, в идентичных условиях, водной лаборатории.
Источник: ГОСТ Р ИСО 8586-2-2008: Органолептический анализ. Общее руководство по отбору, обучению испытателей и контролю за их деятельностью. Часть 2. Эксперты по сенсорной оценке оригинал документа
3.6 повторяемость (repeatability): Прецизионность в условиях повторяемости (ISO 3534-1 [3]).
[ ГОСТ Р ИСО 5725-1-2002, пункт 3.13]
3.13 повторяемость (repeatability): Прецизионность в условиях повторяемости (ИСО 3534-1 [1]).
В отечественных нормативных документах наряду с термином «повторяемость» используют термин «сходимость», содержащийся также в 8.4 ГОСТ Р 51672).
Источник: ГОСТ Р ИСО 5725-1-2002: Точность (правильность и прецизионность) методов и результатов измерений. Часть 1. Основные положения и определения оригинал документа
3.12 сходимость (repeatability): Значение, ниже которого, как можно ожидать, с заданной доверительной вероятностью находится абсолютная разность между результатами двух одиночных измерений, полученных с помощью одного и того же метода на идентичном измеряемом материале, одним и тем же оператором, использующим одну и ту же аппаратуру, в одной и той же лаборатории, за короткий промежуток времени (условия сходимости); при отсутствии других указаний доверительная вероятность составляет 95 %.
Источник: ГОСТ 31371.1-2008: Газ природный. Определение состава методом газовой хроматографии с оценкой неопределенности. Часть 1. Руководство по проведению анализа оригинал документа
сходимость (repeatability): Способность весоизмерительного датчика выдавать последовательные согласованные результаты при одной и той же нагрузке, приложенной к весоизмерительному датчику несколько раз одним и тем же способом при постоянных условиях испытания.
[Международный словарь [1]]
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.6 повторяемость (repeatability): Степень близости размеров, измеренных более чем один раз на одном и том же объекте, одним и тем же методом в одних и тех же условиях.
Примечание - Условия полной повторяемости обеспечивают получение нулевого стандартного отклонения.
Источник: ГОСТ Р ИСО 15536-2-2010: Эргономика. Компьютерные манекены и модели тела. Часть 2. Верификация функций и валидация размеров компьютерного манекена для систем моделирования оригинал документа
3.30 сходимость (repeatability): Расхождение результатов измерений, полученных последовательно через короткие интервалы времени на образцах идентичного материала, одним и тем же методом, одними и теми же средствами, тем же самым наблюдателем, в той же самой лаборатории, в неизменных условиях окружающей среды.
Примечания
1. Временной интервал, равный приблизительно 10-кратному 90 %-ному времени реакции газоанализатора, допускается считать коротким интервалом.
2. Практически подход к измеряемому значению должен быть со стороны как меньших, так и больших значений измеряемой величины.
Источник: ГОСТ Р МЭК 61207-1-2009: Газоанализаторы. Выражение эксплуатационных характеристик. Часть 1. Общие положения оригинал документа
5.2.16.1 повторяемость (repeatability): Прецизионность в условиях повторяемости.
[ИСО 3534-1].
Источник: ГОСТ Р ИСО 6879-2005: Качество воздуха. Характеристики и соответствующие им понятия, относящиеся к методам измерений качества воздуха оригинал документа
Англо-русский словарь нормативно-технической терминологии > repeatability
-
11 соматизация
Тенденция реагировать на стимулы (включая влечения, защиты и конфликты между ними) физически, а не психически. Соматизация, обозначаемая (Фландерсом и Данбар) как соматическая короткая цепь, отражает сдвиг психической энергии по направлению к соматической симптоматике.Соматизация включает как конверсионные реакции, так и (психофизиологические) органические нарушения, но не столько различия межу этими двумя типами нарушений, сколько их общие проявления.По мнению Макса Шура, соматизация связывает процесс симптомообразования с регрессией, возникающей в ответ на острый или хронический конфликт. Соматические реакции ребенка на вредоносные стимулы по мере созревания организма все более заменяются действиями и/или процессами мышления (десоматизация). Однако у невротических лиц психический конфликт нередко оказывает провоцирующее влияние и способствует возникновению регрессивных феноменов, включающих характерные для более ранних фаз развития соматические проявления. Шур называет это ресоматизацией. Десоматизация предполагает существование скрытой способности Я использовать вторичный процесс для нейтрализации энергии; ресоматизация, наоборот, связана с преобладанием первичного процесса, сопровождающегося утратой способности к нейтрализации.\Лит.: [171, 184, 698, 765] -
12 характер
Устойчивое, структурированное функционирование индивида. В восприятии наблюдателя характер представляет собой привычный способ мышления индивида, его чувствования и поведения. В психодинамическом понимании характер определяется как привычный способ разрешения интрапсихических конфликтов. Характер является самостоятельным и независимым понятием, тем не менее можно провести различия с другими терминами, обозначающими наиболее общие аспекты личности, такими, как идентичность, Самость и Я.Характер человека слагается из определенных целостных образований — черт характера, каждая из которых состоит из комплекса связанных между собой дериватов влечений, защит и компонентов Сверх-Я. Черты характера, как и невротические симптомы, являются компромиссными образованиями. Однако черты характера более устойчивы, нежели симптомы, они способны лучше связывать тревогу и переживаются субъектом как часть Самости (как синтонные Я). Черты характера можно также рассматривать в качестве паттернов поведения, развивающихся во времени и отражающих попытки разрешения интрапсихических конфликтов. Понятие характера тесно связано с понятием индивидуального защитного стиля.Организация характера является более абстрактным термином, чем черта характера. Организация характера представляет собой целостное единство, не доступный наблюдению синтез черт, о котором можно судить по поведению и установкам индивида. Однако организация характера — понятие более конкретное и менее метафоричное, чем Я, оно не используется при построении метапсихологической трехкомпонентной модели психики. Чаще этот термин применяется в клинических описаниях, однако он имеет малую объяснительную ценность.Формирование характера — это процесс развития, отличающийся от развития Я, при котором устойчивые паттерны мышления, чувствования и действия консолидируются в виде компромиссных образований, отражающих способы разрешения интрапсихической борьбы между импульсами влечений, с одной стороны, и различными силами сдерживания, изменения и удовлетворения этих влечений — с другой. То, как Я допускает, отторгает или преобразует требования влечений, во многом зависит от окружения развивающегося ребенка. Внешнее окружение (в первую очередь родители) оказывает специфическую фрустрацию, блокирует одни способы реагирования на эту фрустрацию и поощряет другие, подсказывая, как можно справляться с конфликтами между инстинктивными потребностями и страхом дальнейших фрустраций. Более того, посредством идентификаций, ценностей и идеалов, возникающих при разрешении эдипова конфликта (процесс формирования Я-идеала и Сверх-Я), окружение даже создает определенные желания у индивида, устанавливая конкретные цели. Так осуществляется опосредованное воздействие окружения на выбор индивидом путей приспособления внутренних потребностей к внешней реальности. Моделью для развития Я, Я-идеала и Сверх-Я, формирующихся на основе процессов интроекции и идентификации, являются родители ребенка. То, как повлияют родители на формирование характера ребенка, зависит от стадии развития, в которой возникают определяющие ситуации, включающие в себя травму и конфликт. Это зависит также от того, принимает ли ребенок поддерживающее или запрещающее поведение родителей, старается ли подражать им или стремится быть на них непохожим. С другой стороны, решение конфликта путем приспособления к реальности, с помощью цельного и гибкого поведения определяется набором врожденных возможностей и способностей, включающих соотношение сексуальных и агрессивных влечений, а также другие генетические и динамические факторы. И наоборот, под влиянием фиксации и регрессии может возникнуть невротическое компромиссное образование, проявляющееся в виде психопатологической симптоматики или лишенных гибкости патологических черт характера.Хотя далеко не все, что принято относить к понятию характера, является результатом конфликта, аналитикам в своей работе чаще всего приходится иметь дело с чертами, возникающими в результате интрапсихического конфликта. Относительно того, когда начинает формироваться характер, существуют определенные разногласия. Различия имеются уже у новорожденных, однако предсказать, какие черты закрепятся в качестве компонента стабильной психической структуры индивида, затруднительно. Это является предметом современных исследований. Можно утверждать, что формирование характера начинается уже в утробе матери. Однако устойчивая организация характера появляется лишь после разрешения эдипова конфликта и образования дискретного, организованного Сверх-Я. Этот процесс в целом завершается во время индивидуации в подростковом возрасте. Однако события последующей жизни, как позитивные, так и негативные, могут оказывать существенное влияние на характер индивида.Расстройства характера представляют собой разнородную группу патологических нарушений, проявляющихся в виде устойчивого и лишенного гибкости поведения, не сопровождающегося чувством дискомфорта. Если лица с невротическими расстройствами жалуются на свои симптомы, то при расстройствах характера жалобы предъявляются, как правило, со стороны родственников, друзей и коллег пациента. Неврозы представляют собой набор определенных симптомов, расстройства характера затрагивают всю личность и особенно те функции Я, которые обусловливают толерантность к фрустрации, регуляцию влечений, аффективные реакции и объектные отношения. Близкий к этому термин невроз характера, широко употреблявшийся в прошлом, обозначает группу "бессимптомных неврозов". Очевидно сходство между понятиями расстройства характера и психоневроза: во многих случаях одно и то же название применяется для обозначения как типа характера, так и соответствующей ему невротической симптоматики, например, обсессивный характер, фобический характер и т.п.Лица с расстройствами характера разрешают внутренние конфликты путем формирования устойчивых реактивных образований, которые либо позволяют в ограниченных условиях достигать частичного удовлетворения инстинктивных желаний, либо требуют от индивида полного отказа от этих желаний, что выражается в торможении их активности в работе или игре. Такая ригидность характера требует сохранения устойчивых механизмов защиты от инстинктивных импульсов и связанных с ними аффектов — тревоги, раздражительности, депрессии, чувства вины и униженности. Сюда относятся также потребность в любви, безопасности, повышении самооценки и удовлетворении пассивных желаний. Типичные реакции проявляются лишь при определенных обстоятельствах, с другой стороны, характерологические расстройства могут выражаться независимо от ситуации в виде неспецифических и лишенных избирательной направленности проявлений.Рационализация мотивов и идеализация поведения могут затушевывать имеющуюся патологию установок, черт характера и паттернов реагирования. При этом общий результат деятельности таких лиц может быть вполне адаптивным и приносить реальную выгоду. Поэтому они склонны рассматривать собственное поведение как оправданное, разумное, адекватное и сознательное. Поскольку расстройства характера, как правило, являются синтонными Я (в отличие от невротических симптомов), индивиды с такими расстройствами почти не испытывают необходимости в изменении своего поведения. Патологический характер способен в достаточной мере удовлетворить инстинктивные потребности, не вызывая при этом ни тревоги, ни чувства вины, а поведение человека доставляет проблемы не столько ему самому, сколько его окружению. Однако люди с расстройствами характера выдают себя постоянной усталостью и неудовлетворенностью жизнью, своей специфической или общей скованностью, ограниченной и ригидной адаптацией или неожиданным прорывом отраженных импульсов в непосредственной или искаженной форме. Если индивид постоянно ощущает на себе последствия своих действий, будь то на личностном или социальном уровне, он может обратиться за медицинской помощью.Анализ аномалий характера необходим по многим причинам. Однако он вызывает тревогу и выраженное сопротивление анализируемого еще до того, как ему удается распознать природу инстинктивных импульсов и реконструировать детские ситуации, породившие интрапсихические конфликты. Усиление тревоги вызывает невротическую симптоматику, препятствующую успешному разрешению конфликта.Лечение расстройств характера — задача долгая и сложная. Эффективная интерпретация возможна лишь при условии анализа сопротивления характера в виде сопротивления переносу. Для этого требуется активная позиция аналитика, поскольку сам пациент не склонен рассматривать черты своего характера как патологические. Иногда такой аналитический процесс называют характероанализом, хотя сейчас этот термин употребляется нечасто, ибо большинство аналитических техник так или иначе направлены на анализ стабильных паттернов, которые и составляют характер.Проблема классификации черт и расстройств характера на типы характера удовлетворительным образом до сих пор не решена. Основным препятствием здесь является терминологическая путаница, обусловленная различиями в уровнях обобщения эмпирических наблюдений. В качестве упорядочивающего принципа могут служить проявления либидинозной фазы (например, анальный характер), защитные механизмы (например, компульсивный характер) или поведенческие проявления (например, пассивно-агрессивный характер). Типы характера представляют собой произвольные описательные единицы, не имеющие достаточной объяснительной ценности, но тем не менее используемые для концептуализации психопатологических паттернов. Нарушения характера не имеют строго определенного места в спектре проявлений между нормой и патологией. Так, например, некоторые черты нарциссического характера, указывающие на выраженную патологию, не обязательно будут препятствовать адаптации в определенных выбранных индивидом внешних условиях, тогда как стеснительность или чувство неполноценности, в основе которых лежат конфликты более высокого уровня, могут сделать человека недееспособным. Ненормальность становится расплывчатым понятием, когда оно применяется к чертам характера, поскольку оно требует учета социокультурных условий, в которых осуществляется данное поведение. Здесь необходимо учитывать как внутренние факторы (например, гибкость черты характера), так и внешние. Адаптация не тождественна конформизму. В иных случаях протест является признаком силы и автономии.Конкретные типы характера будут обсуждаться отдельно, но некоторые из них рассмотрим здесь в виде примеров. У одного и того же человека могут сосуществовать внешне противоположные черты. Это обусловлено структурой компромиссного образования, в котором может быть выражена та или иная его часть. Так, например, человек с оральным характером может проявлять оптимизм и уверенность в себе либо депрессию и враждебную зависимость — в соответствии с тем, удовлетворены или фрустрированы оральные потребности, лежащие в основе его поведения. Такие лица своим пассивным поведением могут побуждать других заботиться о них или проявлять каннибальскую агрессивную ненасытность. Они могут быть великодушными и благородными, отождествляя себя с кормящей матерью, но могут быть жадными и малодушными, идентифицируясь с фрустрирующей матерью.Если черты характера, формирующиеся на основе конфликтов оральной фазы, удается определить с помощью функций, направленных на удовлетворение соответствующих потребностей, то проявления характера анальной фазы более или менее легко определяются их защитными паттернами. Поэтому компульсивный характер, представляющий собой форму анального характера, описывается в терминах совокупности характеристик, проистекающих из защитных реактивных образований. Как правило, они включают в себя прямолинейность, бережливость и перфекционистские стремления. Лица с уретральным характером описываются как честолюбивые, постоянно соперничающие, но склонные к стыдливости. Лица с фаллически-нарциссическим характером склонны к безрассудству (контрфобическому), самоуверенности и демонстративности. Генитальный характер — психоаналитический термин, обозначающий идеальный уровень психосексуального развития, — это человек, достигший полного примата генитальности в психосексуальном развитии, преодолевший эдипов комплекс и способный к постамбивалентной объектной любви.Черты характера, основанные на реактивных образованиях или фобическом избегании, препятствуют удовлетворению влечений. Черты характера, в которых преобладающим способом защиты является сублимация, допускают целесообразное и адаптивное удовлетворение и рассматриваются как более или менее нормальные. Таким образом, в соответствии с одним из подходов, цель характероанализа состоит в замещении реактивных черт характера сублимированными.Помимо типов характера, описанных на основе либидинозных фаз и защит, применяются и другие типологические термины, которыми обозначаются патологические констелляции, включая те, что проистекают из парциальных влечений. К этой группе относятся "как будто" личность, паранойяльный, депрессивный, пограничный, истерический, нарциссический, невротический, фобический, психотический, садистский, шизоидный, шизотипический и социопатический характеры. Наконец, существуют типы характера, которые не подпадают ни под одну классификацию, но хорошо известны благодаря таким дескриптивным терминам, как "исключения", "сокрушенные успехом" и "невроз судьбы".см. "как будто" личность, паранойяльный характер, депрессивный характер, невротический характер, психотический характер, шизоидный характерсм. также защита, идентичность, компромиссное образование, развитие, Самость, симптом, структурная теория, теория либидо\Лит.: [6, 10, 62, 63, 202, 257, 291, 317, 672, 673, 717] -
13 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
14 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
15 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
17 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
18 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
19 T
виток
-
[IEV number 151-13-14]EN
turn
conductor formed into a curve with the end points close together but not coincident
[IEV number 151-13-14]FR
spire, f
conducteur formant une courbe dont les extrémités sont proches mais non confondues
[IEV number 151-13-14]EN
DE
FR
маркер времени
(МСЭ-Т Н.235.7).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
проверочный контроль
(МСЭ-Т G.808.1).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
телетайп
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
- teletype
- Т
- t
тера-
Префикс, указывающий на коэффициент, равный миллиону в квадрате.
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
тесла
Тл
(единица магнитной индукции)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
- Тл
EN
тонна
—
[[Англо-русский словарь сокращений транспортно-экспедиторских и коммерческих терминов и выражений ФИАТА]]Тематики
EN
- t
- ton
торр
Единица давления, равная 1 мм рт. ст. при 0 °С.
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
- torr
- T
4.1 время реакции t0,5 (response time t0,5): Интервал времени между начальным моментом изменения расхода или температуры потока и моментом, когда изменение значения измеряемой величины достигает 50 %.
Источник: ГОСТ Р ЕН 1434-1-2011: Теплосчетчики. Часть 1. Общие требования
Англо-русский словарь нормативно-технической терминологии > T
20 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
СтраницыСм. также в других словарях:
Реакции гидратации — – химическое взаимодействие цемента с водой с образованием кристаллогидратов. [Терминологический словарь по бетону и железобетону. ФГУП «НИЦ «Строительство» НИИЖБ им. А. А. Гвоздева, Москва, 2007 г. 110 стр.] Рубрика термина: Свойства… … Энциклопедия терминов, определений и пояснений строительных материалов
Общие термины — Термины рубрики: Общие термины Абсолютно чёрное тело Абсолютный минимум Абсолютный показатель ресурсоиспользования и ресурсосбережения … Энциклопедия терминов, определений и пояснений строительных материалов
Общие термины, бетон — Термины рубрики: Общие термины, бетон Активация Активность поверхностная Активность пуццолановая Активность термодинамическая … Энциклопедия терминов, определений и пояснений строительных материалов
Психотерапия: общие факторы (psychotherapy: common factors) — Общие факторы П. указывают на эффективные аспекты лечения, к рые присущи самым разнообразным формам П. Нек рые авторы утверждают, что они могут быть более важными, чем те факторы, к рые свойственны только к. л. специфическим методам лечения и к… … Психологическая энциклопедия
Тепловой эффект химической реакции — –теплота, поглощаемая (выделяемая) в результате химического превращения исходных веществ в продуктыреакции в количествах, соответствующих уравнению химической реакции при следующих условиях: … … Энциклопедия терминов, определений и пояснений строительных материалов
Неспецифические адаптационные реакции организма — Эта статья или раздел нуждается в переработке. Пожалуйста, улучшите статью в соответствии с правилами написания статей … Википедия
Стойкость против щелочной реакции — – в случае если имеются подозрения на чувствительность заполнителя к щелочной реакции (содержания N20 или К2О в цементе или других составляющих) и бетон подвержен воздействию влаги, необходимо предпринять действия, предупреждающие… … Энциклопедия терминов, определений и пояснений строительных материалов
Эффект тепловой реакции — (процесса) – количество теплоты, выделившееся или поглощенное в ходе осуществления реакции (процесса), называются экзо – или эндотермическими. [Ушеров Маршак А. В. Бетоноведение: лексикон. М.: РИФ Стройматериалы. 2009. – 112 с.] … Энциклопедия терминов, определений и пояснений строительных материалов
время реакции — 3.1 время реакции (time of reaction): Промежуток времени между подведением пробного вещества к месту расположения течи и появлением выходного сигнала течеискателя. Источник: оригинал документа 3.34 время реакции (response time): Время,… … Словарь-справочник терминов нормативно-технической документации
Механизм реакции — совокупность составляющих реакцию элементарных процессов (стадий), например для гидратации вяжущих веществ, – смачивание, адсорбция, растворение, собственно химическая реакция, образование зародышей, кристаллизация и др. [Ушеров Маршак А. В … Энциклопедия терминов, определений и пояснений строительных материалов
Механохимические реакции — – хим. превращения, инициированные или ускоренные механическими воздействиями, происходящие в твердых телах вследствие развития деформаций и разрушения, облегчаемые в присутствии ПАВ. [Ушеров Маршак А. В. Бетоноведение: лексикон. М.: РИФ… … Энциклопедия терминов, определений и пояснений строительных материалов
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский